MASA-RESORTE-AMORTIGUADOR
En la física, la amortiguación es un efecto
que reduce la amplitud de las oscilaciones en un sistema oscilatorio, en
particular el oscilador
armónico. Este efecto está relacionado linealmente con la
velocidad de las oscilaciones. Esta restricción conduce a una ecuación
diferencial lineal de movimiento, y una solución analítica sencilla.
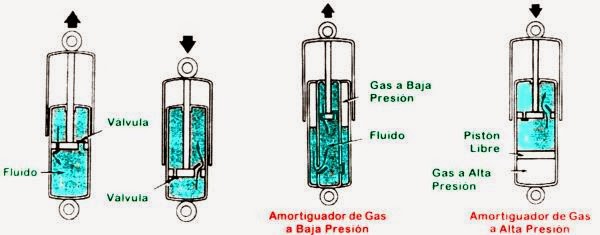
En la mecánica, la amortiguación se pueden
realizar con un amortiguador. Este dispositivo utiliza el arrastre viscoso de
un fluido, tal como aceite, para proporcionar una resistencia que está
relacionado linealmente con la velocidad. La fuerza de amortiguación Fc se
expresa de la siguiente manera:
donde c es el coeficiente de amortiguamiento
viscoso, dada en unidades de segundos newton por metro o simplemente kilogramos
por segundo. En aplicaciones de ingeniería a menudo es deseable para linealizar
las fuerzas de arrastre no lineales. Esto puede por encontrar un coeficiente de
trabajo equivalente en el caso de la armónica forzar. En los casos no
armónicas, las restricciones a la velocidad pueden provocar linealización
exacta.
Generalmente, amortiguadas osciladores
armónicos satisfacen la ecuación diferencial de segundo orden:
donde? 0 es la frecuencia angular del oscilador no
amortiguado y? es una constante llamada coeficiente de amortiguamiento.
El valor del coeficiente de amortiguamiento?
determina el comportamiento del sistema. Un oscilador armónico amortiguado puede ser:
- Overdamped: El sistema vuelve al
equilibrio sin oscilar. Los valores
más altos del coeficiente de amortiguamiento? volver al equilibrio más
lentamente.
- Críticamente amortiguado: El
sistema vuelve al equilibrio tan pronto como sea posible sin oscilante.
Esto a menudo se desea para la amortiguación de los sistemas, tales como
puertas.
- Subamortiguado: El sistema oscila
con la amplitud que disminuye gradualmente a cero.
- No amortiguado: El sistema oscila
a su frecuencia de resonancia natural.
Definición
En la física y la ingeniería, la
amortiguación puede ser modelado matemáticamente como una fuerza sincrónica con
la velocidad del objeto, pero en dirección opuesta a ella. Si tal fuerza es
también proporcional a la velocidad, como para un simple amortiguador viscoso
mecánica, la fuerza puede estar relacionado con la velocidad por
donde c
es el coeficiente de amortiguamiento, en unidades de newton-segundo por metro.
Esta fuerza se puede utilizar como una
aproximación a la fricción causada por arrastre. Mientras que la fricción se
relaciona con, si la velocidad de limitación de un pequeño rango, este efecto
no lineal puede ser pequeña. En tal situación, un coeficiente de fricción
linealizado se puede determinar que produce poco de error en comparación con la
solución de segundo orden.
Esta relación es perfectamente análogo a la
resistencia eléctrica como se describe por la ley de Ohm.
Ejemplo: masa-resorte-amortiguador
Un sistema masa-resorte-amortiguador ideal,
con masa m, primavera k constante y amortiguador viscoso de coeficiente de
amortiguación c está sujeto a una fuerza oscilatoria
y una fuerza de amortiguación
Los valores pueden estar en cualquier sistema
coherente de unidades, por ejemplo, en unidades del SI, m en kilogramos, k en
newtons por metro, y c en Newton-metros por segundo o kilogramos por segundo.
El tratamiento de la masa como un cuerpo
libre y la aplicación de la segunda ley de Newton, la fuerza Ftot total del
cuerpo es
donde a es la aceleración de la masa y x es
el desplazamiento de la masa respecto a un punto de referencia fijo.
Desde Ftot = Fs Fd,
Esta ecuación diferencial puede ser
reorganizado en
Los siguientes parámetros se definen a
continuación:
El primer parámetro? 0, se llama la
frecuencia natural del sistema. El segundo parámetro,?, Se llama el factor de
amortiguamiento. La frecuencia natural representa una frecuencia angular,
expresado en radianes por segundo. El coeficiente de amortiguamiento es una
cantidad adimensional.
La ecuación diferencial se convierte ahora
Continuando, podemos resolver la ecuación,
suponiendo una solución x tal que:
Donde el parámetro? es, en general, un número
complejo.
Sustituyendo esta solución supone en la
ecuación diferencial se obtiene
Que es la ecuación característica.
Resolviendo la ecuación característica dará
dos raíces, y -. La solución de la ecuación diferencial es por lo tanto
En la que A y B se determinan por las
condiciones iniciales del sistema:
Comportamiento del sistema
El comportamiento del sistema depende de los
valores relativos de los dos parámetros fundamentales, la frecuencia natural? 0
y el coeficiente de amortiguamiento? En particular, el comportamiento
cualitativo del sistema depende de manera crucial de si la ecuación cuadrática
para? tiene una solución real, dos soluciones reales, o dos soluciones
complejas conjugadas.
Amortiguamiento crítico
¿Cuándo? = 1, hay una raíz doble?, Que es
real. El sistema se dice que está críticamente amortiguado. A converge sistema
críticamente amortiguado a cero tan rápido como sea posible sin oscilar. Un
ejemplo de amortiguamiento crítico es más cerca de la puerta visto a muchas
puertas con bisagras en edificios públicos. Los mecanismos de retroceso en la
mayoría de las armas de fuego también se amortiguan críticamente para que
vuelvan a su posición original, después de que el retroceso debido a la
cocción, en el menor tiempo posible.
? En este caso, con una sola raíz, no es en
adición a la solución  solución TE t:
solución TE t:
Donde y son determinados por las condiciones
iniciales del sistema:
El exceso de amortiguación
¿Cuándo? > 1, el sistema está
sobre-amortiguado y hay dos raíces reales diferentes. Una sobre-amortiguado de
puerta más cerca tardarán más tiempo para cerrar de una puerta críticamente
amortiguado haría.
La solución a la ecuación de movimiento es:
Donde y son determinados por las condiciones
iniciales del sistema: